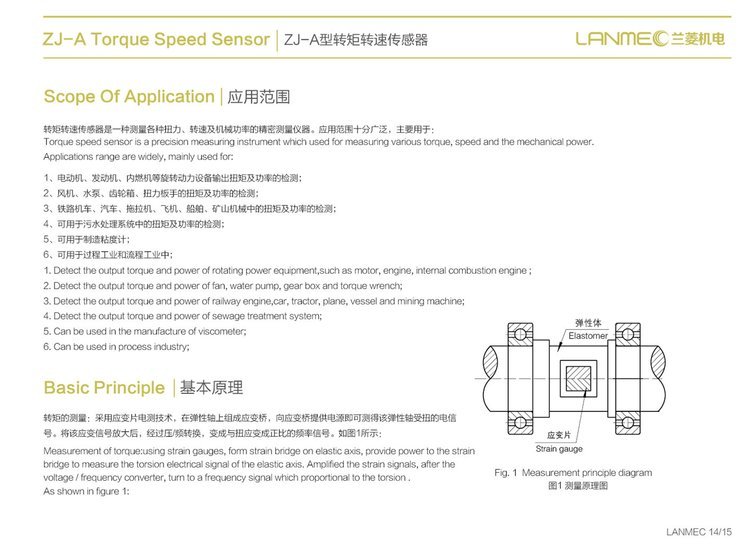
扭矩传感器是采用应变片电测技术 ,在弹性轴上组成应变桥,向应变桥提供电源即可测得该弹性轴受扭的电信号。将该应变信号放大后,经过压/频转换,变成与扭应变成正比的频率信号。该传感器可以精确测量各种扭力、转速及机械功率。
扭矩传感器也叫力矩传感器,扭力传感器,转矩传感器。分为动态和静态两大类。其中动态转矩传感器又叫做转矩转速传感器,非接触扭矩传感器。扭矩传感器可用来进行发动机减速机等旋转力测量。特别是我们平常用的最多的汽车,可分为燃油汽车和电动汽车。他们都是通过发动机或者电池输出功率,变成旋转的力向外输送,再通过变速箱减速箱扭矩传感器的测试台。它是由负载,显示动态扭矩传感器,仪表记录仪。发动机所组成。通过数据线把信号传送到动态扭矩传感器上面,我们图上所看到的是DYN200,它显示的有扭矩04107N.m功率:068.80KW转速:597RPM。转矩转速功率实时通过显示屏显示。可用来进行发动机减速器等旋转力测量。
其实扭矩的测量测量在我们生活中应用的是非常多的,我们举一个简单的比方,我们平常用于儿童开发智力的魔方,他就是一共有6个面,每个面代表不同的颜色,我们要通过方法把6种打乱的颜色进行通过旋转拼接成每一面的颜色都完成统一的。作为玩具的生产厂家,他生产魔方的时候,他要考虑到我们的受众儿童有多大的力,在使用过程中双手进行旋转的时候,需要用了多大的力,这个扭力的大小,就可以用到扭矩传感器来进行测量?
当然测量魔方使用的扭距有一套严格的方法,我们事先要做好一个橡胶的模具,是一副一共两个分别左右,固定着魔方的左右两侧,然后进行分别进行前后左右的旋转时,所使用的力矩通过显示屏显示出来到底有多大,符合人体工程学原理,以及小朋友力量的大小,这才是对儿童魔方制作的一个理论数据,动用到扭矩传感器,才会制作出合格的产品。

扭矩传感器特点:
1. 转矩转速动态测量、供电及信号非接触传递、输出信号数字化。
2. 检测精度高、稳定性好、抗干扰性强。
3.不需反复调零即可连续测量正反转扭矩。
4.既可测量静止扭矩,也可测量动态扭矩。
5.可脱离二次仪表独立使用,输出信号可供PLC、PC直接使用。
6.可根据客户要求非标定制。
扭矩传感器主要功能及性能指标 :
扭矩示值误差(Torque indication error): <± 0.2 % F ・ S
灵敏度 (Sensitivity): 1±0.2 mv / V
非线性(Nonlinear): ≤±0.2 % F・S
重复性(Repeatability): ≤±0.2% F・S
滞后(Lag): ≤0.2 % F・S
零点飘移(24小时)Zero drift (24 hours) : ≤0.1 % F・S
输出阻抗(Output impedance): 1KΩ ±3Ω
绝缘阻抗(Insulation resistance): >500MΩ
静态超载(Static overload): 150 %
断裂负载(Breaking load): 200 %

电源电压(Power supply voltage):DC±15V±5% ,DC 24V(可选 optional)
转速输出信号:60-2000个脉冲/转(可选) Speed output signal: 60-2000 pulse / turn(optional)
零转矩频率输出( Zero torque frequency output):10KHZ
正向转矩满量程频率输出(Positive torque full scale frequency output ):15KHZ
反向转矩满量程频率输出(Reverse torque full scale frequency output ):5KHZ
信号占空比(Signal duty ratio): (50±10)%
传感器功耗(Power consumption of the sensor): 4W
使用温度(Temperature when use): -20 ~ 70℃
相对湿度(Relative humidity): ≤90%RH
信号输出:10±5KHz (可选4~20mA,0~5V,0~10V信号输出 / 485通讯,通信协议见P12)
Signal output: 10±5KHz(Optional 4 ~ 20mA, 0 ~ 5V, 0 ~ 10V signal output / 485 communication, communication agreement pls. see P12)
量程范围: 0.01N•m~2000K N•m,可以非标定制 Measurement range: 0.01~2000K N•m Non-standard can customization.
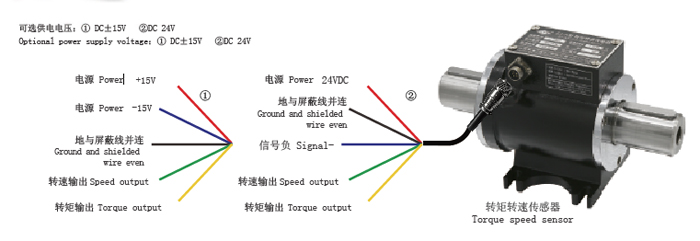
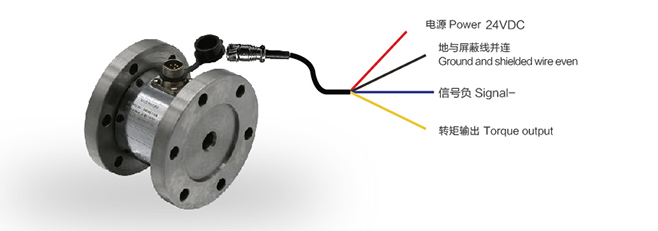
插头连接及引线定义
为了安全起见,传感器应依据操作手册中的说明进行操作。此外,在使用中必须遵守相关应用的
法律和安全的基本要求。对配件的使用也应如此。
可选供电电压:1,DC+15V 2, DC 24V optional power supply voltage:1,dc+15V 2,DC 24V
电源power+15V 电源power-15V
地与屏蔽并连 Ground and shielded wire even 转速输出Speed output 转矩输出Torque output
电源Power 24VDC 地与屏蔽线并连 Ground and shielded wire even
信号负Signal 转速输出 Speed output 转矩输出 Torque output
In the interests of safety, the transducer should only be operated as described in the
Operating Manual. It is also essential to comply with the legal and safety requirements for
the application concerned during use. The same applies to the use of accessories.
该传感器在指定用途的意义层面并非是一件安全的元件。正确且安全地操作此传感器需要严格的
运输,正确的储存、组装并安装,以及仔细的操作。
The torque speed sensor is not a safety element within the meaning of its designated
use. Proper and safe operation of this transducer requires proper transportation, correct
storage, assembly and mounting, and careful operation.
未能遵守安全说明的一般危险 General dangers of failing to follow the safety instructions
传感器和目前的工艺水平相对应,是故障自动保险的。如果传感器安装不当并且由未经培训的人
员操作,它可能会导致潜在的危险。
The transducer corresponds to the state of the art and is failsafe. The torque speed
sensor can give rise to remaining dangers if it is inappropriately installed and operated by
untrained personnel.
任何涉及安装、启动、维护或修理传感器的人一定已经阅读并理解了操作手册,特别是技术安全说
明。
Everyone involved with mounting, starting up, maintaining, or repairing the torque speed
sensor must have read and understood the Operating Manual and in particular the technical
safety instruction.
潜在危险 Residual dangers
传感器的性能和使用范围在应用中仅涉及一小部分的扭矩测量技术。此外,设备规划人员、安装
人员和操作人员应计划、实施以减少潜在危险的方式并对扭矩测量技术的安全工程的想法做出回应。
必须始终遵守现场监管。必须提及与扭矩测量技术相关的潜在危险。
The scope of supply and performance of the torque speed sensor covers only a small
area of torque measurement technology. In addition, equipment planners, installers and
operators should plan, implement and respond to the safety engineering considerations of
torque measurement technology in such a way as to minimize remaining dangers. On-site
regulations must be complied with at all times. Reference must be made to remaining
dangers connected with torque measurement technology.


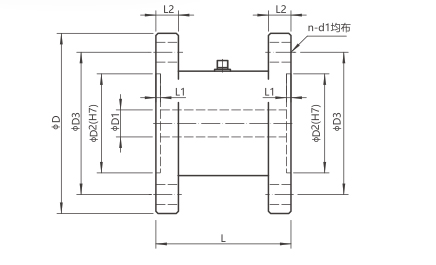
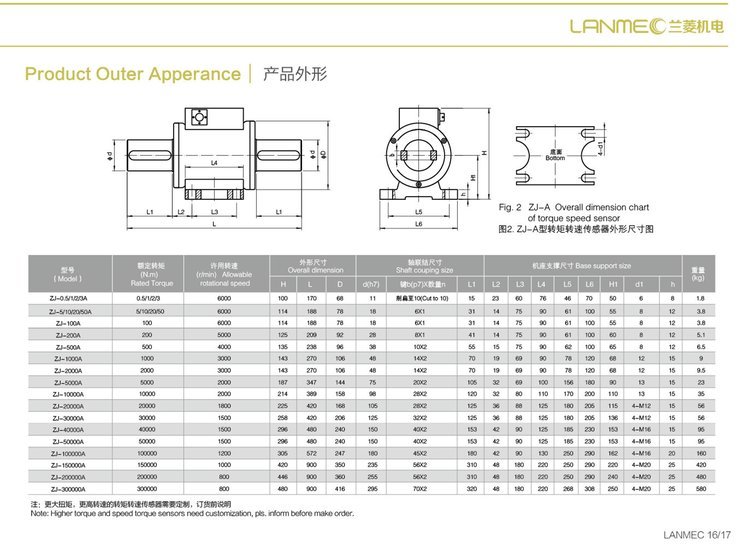
ZJ-AP型盘式扭矩传感器输入、输出端都采用法兰联接方式(其中一端必须刚性联接)。由于该型号传感器不使用轴承,可有效地避免因轴承发热产生的测量误差。适用于高速旋转或要求轴向尺寸更短的场合使用。
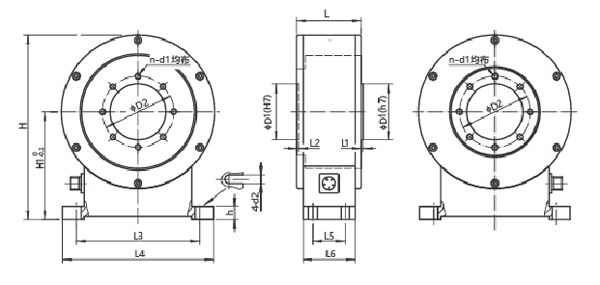
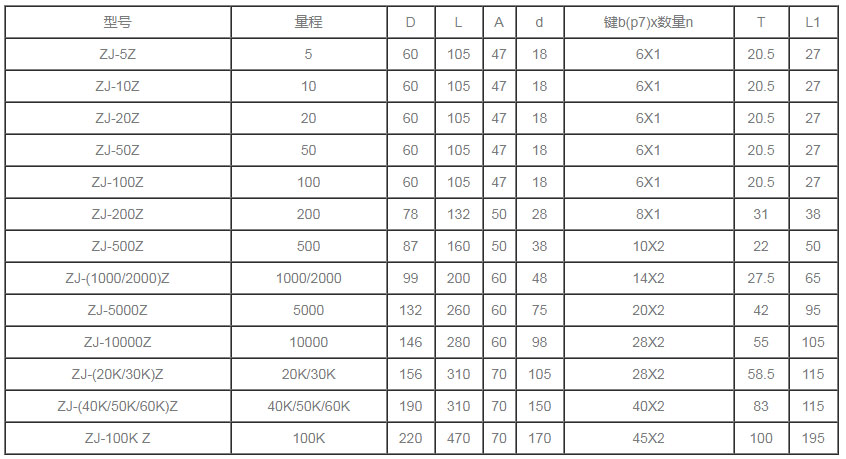
扭矩传感器外形安装尺寸图
|
型号
|
量程
|
L
|
H
|
H1
|
D1
|
D2
|
n-d1x深度
|
L1
|
L2
|
L3
|
L4
|
L5
|
L6
|
d2
|
h
|
|
ZJ-5/10/20/50AP
|
5/10/20/50
|
60
|
171
|
100
|
52
|
66
|
6-M6X10
|
2
|
2
|
115
|
140
|
30
|
48
|
7
|
12
|
|
ZJ-100/200AP
|
100/200
|
60
|
171
|
100
|
52
|
66
|
6-M6X10
|
2
|
2
|
115
|
140
|
30
|
48
|
7
|
12
|
|
ZJ-500AP
|
500
|
70
|
200
|
120
|
62
|
76
|
6-M8X12
|
3
|
3
|
135
|
160
|
40
|
58
|
9
|
15
|
|
ZJ-1000AP
|
1000
|
70
|
220
|
130
|
72
|
96
|
8-M10X12
|
3
|
3
|
155
|
180
|
36
|
58
|
11
|
15
|
|
ZJ-2000AP
|
2000
|
70
|
220
|
130
|
72
|
96
|
8-M10X16
|
3
|
3
|
155
|
180
|
36
|
58
|
11
|
15
|
量程5000~2000K N•m 参数来电索取 Call for 5000 ~ 2000K N•m parameters
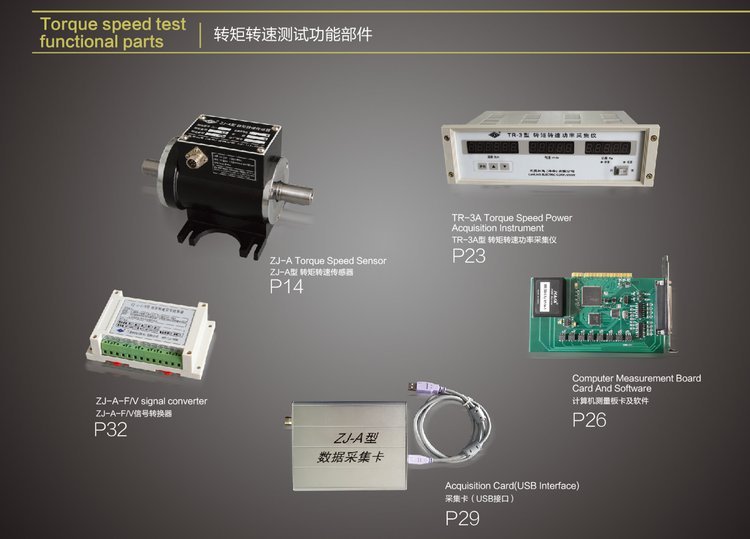
信号输出与信号采集
1、扭矩信号输出基本形式:
盘式扭矩传感器二次仪表
・ 方波信号、脉冲信号。
・ 可根据用户需要制成电压模拟信号输出或电流模拟信号输出(单向、静止扭矩测量)。
2、扭矩信号处理形式:
・ 扭矩传感器输出的频率信号送到频率计或数字表,直接读取与扭矩成正比的频率信号或电压、电流信号。
・ 扭矩传感器的扭矩与频率信号送给单片机二次仪表,直接显示实时扭矩值、转速及输出功率值及 RS232通讯信号。
・ 直接将扭矩与转速的频率信号送给计算机或 PLD进行处理。
ZJ-Z型轴式静态扭矩传感器广泛应用于试验机、扭力扳手、转向机、轴承、电动执行器、阀门、液压等静止扭矩测试系统中,由于出色的稳定性、较高的测量精度和极高的性价比而受到用户的青睐。
技术指标:
1.频率响应100μs
2.绝缘强度:200MΩ(100V)
3.供电:DC12~24V 电流≥50mA
4.输出信号:电流4~20mA,电压1~5V,
频率方波10KHz/±5 KHz(可选)
5.扭矩传感器内阻:1000Ω
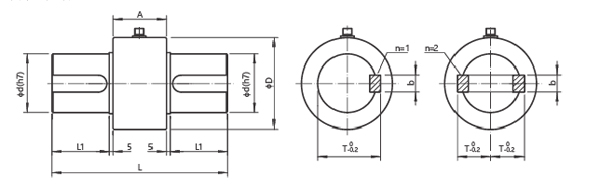
外形安装尺寸图
量程200K~2000K N•m 参数来电索取 可非标定制
扭矩传感器用途与特点
适用与静态、非连续旋转的扭矩力值的测量与控制
量程:1000,2000,3000,5000N.m
技术参数:
|
额定载荷
|
1000~5000N.m
|
|
综合精度
|
0.1 0.3 0.5 (线性+滞后+重复性)
|
|
灵敏度
|
1.0~2.0mV/V
|
|
蠕变
|
±0.05%F・S/30min
|
|
零点输出
|
±2 %F・S
|
|
零点温度影响
|
±0.05%%F・S/10℃
|
|
输出温度影响
|
±0.05%F・S/10℃
|
|
工作温度
|
-20℃~+65℃
|
|
输入阻抗
|
750±15 Ω 或 380±10 Ω
|
|
输出阻抗
|
700±5 Ω 或 350±3 Ω
|
|
绝缘电阻
|
〉5000 MΩ
|
|
安全过载
|
120% F・S
|
|
供桥电压
|
建议10VDC
|
|
材质
|
合金钢
|
|
接线方式
|
输入+:红 输入-:黑
|
|
|
输出+:绿 输出-:白
|
ZJ-FZ型法兰式静态扭矩传感器被广泛应用于试验机、扭力扳手、转向机、电动执行器、阀门、液压等静止扭矩测试系统中,由于出色的稳定性、较高的测量精度和极高的性价比而受到用户的青睐。
扭矩传感器技术指标
1.频率响应100μs
2.绝缘强度:200MΩ(100V)
3.供电:DC12~24V 电流≥50mA
4.输出信号:电流4~20mA,电压1~5V,
频率方波10KHz/±5 KHz(可选)
5.扭矩传感器内阻:1000Ω
外形安装尺寸图
|
型号
|
量程
|
L
|
D
|
D1
|
D2
|
D3
|
n-d1
|
|
ZJ-5FZ
|
5
|
60
|
80
|
10
|
46
|
65
|
6-M8
|
|
ZJ-10FZ
|
10
|
60
|
80
|
10
|
46
|
65
|
6-M8
|
|
ZJ-20FZ
|
20
|
60
|
80
|
10
|
46
|
65
|
6-M8
|
|
ZJ-50FZ
|
50
|
60
|
80
|
10
|
46
|
65
|
6-M8
|
|
ZJ-100FZ
|
100
|
60
|
80
|
10
|
46
|
65
|
6-M8
|
|
ZJ-(200/300/400/500)FZ
|
200/300/400/500
|
70
|
100
|
16
|
62
|
82
|
6-M10
|
|
ZJ-(1000/2000)FZ
|
1000/2000
|
75
|
116
|
20
|
72
|
94
|
6-M12
|
|
ZJ-5000FZ
|
5000
|
85
|
165
|
25
|
115
|
142
|
8-M12
|
|
ZJ-10000FZ
|
10000
|
95
|
205
|
40
|
135
|
173
|
8-M18
|
|
ZJ-(20K/30K)FZ
|
20K/30K
|
115
|
245
|
50
|
155
|
205
|
8-M20
|
|
ZJ-(40K/50K/60K)FZ
|
40K/50K/60K
|
120
|
280
|
50
|
200
|
240
|
10-M20
|
|
ZJ-100KFZ
|
100K
|
150
|
318
|
50
|
230
|
274
|
10-M24
|
量程200K~2000K N•m参数来电索取,可非标定制。




我把所知传感器拆开,在这个位置里面有两个霍尔传感器,这里也有两个360角度传感器,请大家看两个细节,上面的齿轮是有磁性的,也就是两块磁铁,有一个齿轮是偏心的,当转动这个齿轮的时候,里面的磁铁是偏心的,另外一个传感器的信号是以占空比方式来进行输送给电脑的,这个简单的扭矩传感器的原理图已经画出来了,电源是五伏的电源地线,两条信号输出线输出给电脑,有8条线,两个5V,4个信号线,两个地线,分别给这两个传感器进行供电和打铁,等会给他通电测试一下他的信号是怎么变化 的,我在这两个地方加了两个电容来进行滤波,因为制作的两个电源不是行稳定有杂波,选测试360角度传感器,看他的信号是怎么变化的,直接上示波器,现在用示波器去测试一下两个传感器他的信号电压的变化,中间的两个是信号,他现在是一个标准的方波,上面有一定的杂波,可能是我的电源不是很稳定,这边也是一个标准的方波,我现在去转动一下这个齿轮,看一下他的波形变化,从示波器可以看出,这两个传感器他的信号一个标准的方波形式输送给电脑,再测试另外一个传感器,我的解理是检测方向当前是左打方向还是右打方向的,也用这个示波器他的的波形,但是一个人不好操作,只能简单的看一下,这两边就是信号,这是这个波形的电压是相反的,就是是说我给他通上电源以后,去测量他的信号线的时候,用螺母刀靠近这个传感器的时候,他们两个之间的信号电压变化是相反的,一个是向上升的,一个是向下升的。我简单的画了电压变化的图,在静态没有打方向的情况下,两具信号大概在1.6伏左右,如果说往左打方向的时候,假如说信号1的信号电压上升,信号2的信号电压了就是往下降,那么往右打方向的时候了,信号1的信号电压是往下降的,信号2的信号电压是往上升的,他们 两个信号电压之间的逻辑关系就是这样的,具体他的信号电压是多少,只能去简单的测量一下,现在电子助力转向系统这一块也就研究到这里。
判断机械能守恒的方法与条件:
在只有重力(弹簧弹力)做功时,物体的动能和重力势能(弹性势能)发生相互转化,但其总和保持不变。这个结论称为机械能守恒定律。判断机械能守恒的方法一般有两种:
(1)根据机械能守恒的条件判断。分析物体或系统所受的力,判断重力以外的力(不管是内力还是外力)是否对物体做功,如果重力以外的力对物体或系统做了功,则物体或系统的机械能不守恒,否则机械能守恒。
(2)机械能量的转化判断。对于一个物体或系统,分析是否只存在动能和重力势能(弹性势能)的相互转化。如果只存在动能和重力势能(弹性势能)的相互转化,而不存在机械能和其他形式的能量的转化,机械能守恒,否则机械能不守恒。
同学们在学习机械能守恒的过程中,由于对守恒条件的理解不够深刻,经常出现一些错误的认识,下面就两种常见错误认识进行分析。
错误认识一:物体所受的合外力不为零时,物体的机械能一定不守恒。
分析:这种说法不对。机械能守恒的条件是重力(弹簧弹力)以外的力不做功,而不是合外力为零。例如小球在自由落体过程中,仅受重力作用,合外力不为零,但运动过程中只有重力做功,符合机械能守恒定律的条件。
错误认识二:只要机械能的总量不变,也就是机械能守恒。
分析:这种说法也是不正确的。机械能守恒的条件是只存在动能和重力势能(弹性势能)的相互转化,而不存在机械能和其他形式的能量的转化,例如用手拉一物体恰好克服斜面摩擦力沿斜面加速下滑,动能增加,重力势能减少,机械能总量保持不变。可是由于在运动过程中:从功的角度分析,除重力外还有人的拉力及摩擦力对物体的做功,不符合机械能守恒的条件,或从能量转化的角度分析,除了机械能外还有人的化学能及因摩擦而产生的内能参与转化,故此过程不符合机械能守恒的条件。
例:下列关于机械能是否守恒的叙述正确的是(BD)
A. 做匀速直线运动的物体机械能一定守恒
B. 做匀变速直线运动的物体机械能可能守恒
C. 合外力对物体做功为零时,机械能一定守恒
D. 只有重力对物体做功,物体机械能一定守恒
解析:对A、C选项,做匀速直线运动的物体(合外力做功为零),除了重力做功外,可能还有其他力做功,如降落伞在空中匀速下降时,除了重力做功外,空气阻力也对降落伞做功,所以机械能不守恒,故A、C选项是错误的。
B选项中做匀变速直线运动的物体可能只受重力且只有重力做功,如自由落体运动,物体机械能守恒。故B选项是正确的。
D选项符合机械能守恒的条件,所以本题的正确答案应为BD.
综上所述,我们在具体判断机械能是否守恒时,一般从以下两方面考虑:
一、从做功的角度考虑
①对于一个物体,若只有重力做功,而其他力不做功,则该物体的机械能守恒。
②对于由两个或两个以上物体(包括弹簧在内组成的系统),如果系统只有重力做功或弹力做功,则系统的机械能守恒。
二、从能量转化的角度考虑
物体间只有动能、重力势能和弹性势能之间的相互转化,系统与外界没有机械能的转移,系统内部没有机械能与其他形式能的转化,则系统的机械能守恒。
扭矩测量广泛应用于汽车,航空,航天,航模,电力,汽车,能源化工等等各个工业领域,正确的进行扭矩测量是产品研发性能检测、状态监测自动控制,节能动力平衡指示的保证,所以说今天我们就来聊一聊扭矩测量的相关技术支持。
我们先来看一下扭矩的定义,扭矩就是使机械构件产生转动效应,并伴随扭转变形的力或者是力矩,也叫做转矩,单位是牛米,转矩符号呢是由右手螺旋法则确定的,也就是说你的右手大拇指所指的方向,就是扭矩的方向,其中扭矩矢量我们规定,它的指向与截面的位法线方向一致的时候呢是正,反正就是负。扭矩有力偶和力矩两种表现形式,力矩就是我们在高中物理里面所学的作用力使物体绕着转动轴或者是支点转动的趋向,他的公式就是力矩等于力乘以力臂。
那对于力偶是作用于刚体上的一对大小相等作用相反,力偶和力矩的表达式虽然是相同的,但是呢它们是有区别的,力偶的对象上周五接下的作用产生的是存留局,力矩是构建单边受理,相当于镜像力F1撇和6fl的复合作用效应,构件在静压力F1撇的作用下受到弯矩作用,使得轴承摩擦阻力增加,在实际应用中我们在做现场标定的时候,很多人家采用力*力臂方式,这种方式呢,就会产生径向力和弯矩的问题。对于旋转机械我们又有这样两个公式,一个就是有扭距等于转动惯量乘以角加速度,另外一个就是扭矩等于9.55功率除以转速,为了大家更好的理解扭矩这些公式,我将力学方面的相关的定律给大家复习一下。
牛顿的三大定律,那牛顿的第一定律,力是改变物体运动状态的原因,也就是说物体在没有受到力或者是合力为0的时候,总是保持匀速直线运动或者静止状态,那对应到扭矩这一块来,就是物体在没有受到扭矩的作用是或者是扭矩为0的时候就,总是保持匀速旋转或者是静止状态。
牛顿第二定律讲了力和物体的质量加速度的关系,也就是说F=ma那对应的扭矩这就是扭矩等于转动惯量乘以角加速度。
牛顿第三定律他讲了力是物体间的相互作用,也就是说两个物体之间的作用力和反作用力,总是同时在一条直线上,大小相等,方向相反。
我们扭矩测量里面的一种反作用力扭矩测量就是采用的这种原理。我们经常听到有人在问扭矩传感器测量的是驱动扭矩、负载扭矩还是其他什么扭矩,那这里我就做了一个简化的模型,那M0里那就分别代表着平衡的驱动与负载,那这个假想截面就相当于我们的扭矩传感器,我们采用截面法可以来进行分析,截面板加这个轴系分为了左右两侧,左右两侧分别有Y6M0和内6T和T1撇,平衡方式可知T撇是等于M0=T的。因为呢,T和T撇是同一截面上的内力,它们应该有相同的大小和正负的,对于他T和T撇的方向,我们可以按照右手螺旋法则来确定,我们可以看到在左侧我们四指直线T的这个方向,那我们的大拇指指向右又那这时候呢,他的扭矩矢量的指向是以截面的外环线方向是一致的,所以说这时候它是正的,而对于呢也同样的,我们是指指向他的扭矩加载的方向,拿大拇指是指向左侧的,同样它也是指向了截面的Y法线的方向,所以说它也是正的,以上就解释了我们为什么说有一句传感器可以考察整个周期中任意点的扭矩,由于实际工作中我们要考虑了整个轴系的质量,那我们可以思考一下,对于我们需要测量虚构扭矩来讲,扭矩传感器应该安装在更靠近驱动侧还是负载侧?
为了更好的让大家理解截面法,那我来聊一聊扭矩图,那扭矩图就是以平行于杆轴线的坐标,X表示截面的位置,以垂直于X轴的坐标截面表示,前面有句子这张图我给出了一个传动系统的一个简化模型,那一般呢会直接给出功率转速值,那我们为了简便就做了一个简化,那对于这个图的扭矩图怎么来画呢?结果就是这样。我们取左端为参考正项,那所有的截面我们也从左侧的截面来看,我们对ab段我们可以看到,我们可以看到ab段的内力偶为10千牛米,那对于BC段我们可以看到BC段的内力偶,10+10=20,对于CD段,那它的内力偶为10+10-40=-20千牛米,同样如果我们从右侧去看的话,我们可以得出同样的结果。
| 
